Содержание
Особенности асинхронного электродвигателя
В современной электроэнергетике почти повсеместно переменный ток вытесняет постоянный.
Это объясняется многими преимуществами машин переменного тока в сравнении с машинами постоянного тока. В частности, у машин переменного тока вес, габариты и стоимость меньше, а к. п. д. выше; они проще в обслуживании, долговечнее и надежнее машин постоянного тока. Правда, электродвигатели переменного тока хуже поддаются регулировке, они развивают значительно меньшие пусковые моменты. Поэтому, если от электродвигателей требуются высокие регулировочные качества и повышенные пусковые моменты, применяют электродвигатели постоянного тока.
Привод механизмов портовых подъемно-транспортных машин чаще всего осуществляется асинхронными электродвигателями трехфазного переменного тока, получившими наибольшее распространение в электроэнергетике. Зависимости от исполнения ротора, различают асинхронные электродвигатели с короткозамкнутым ротором и с фазным ротором (с контактными кольцами). Принципиальная схема включения этих электродвигателей приведена на рис. 40..
Из курса электротехники известно, что принцип действия асинхронных электродвигателей основан на использовании так называемого вращающегося магнитного поля. При подаче трехфазного тока в обмотке статора создается магнитное поле, вращающееся со скоростью
где f— частота тока в обмотке статора;
р — число пар полюсов обмотки статора.
Эта скорость называется синхронной. Магнитное поле статора, (пересекая обмотку ротора, наводит в ней э. д. с., которая создает в цепи ротора ток. Последний, взаимодействуя с магнитным полем статора, образует вращающий момент, заставляющий ротор вращаться в ту же сторону, что и магнитное поле статора. При нормальной работе асинхронного электродвигателя его ротор вращается со скоростью п2<п1. Если бы скорость вращения ротора была равна скорости, с которой вращается магнитное поле статора, то последнее относительно ротора было бы неподвижным. В этом случае э. д. с. и ток в обмотке ротора были бы равны нулю и никакого вращающего момента не возникло бы.
В этом случае э. д. с. и ток в обмотке ротора были бы равны нулю и никакого вращающего момента не возникло бы.
Величиной, характеризующей работу асинхронного электродвигателя, является скольжение s:
где n1—синхронная скорость;
n2 — скорость вращения ротора.
Зная скольжение, нетрудно определить скорость вращения электродвигателя
При работе электродвигателя без нагрузки скорость его близка к синхронной, а скольжение очень мало.
Двигательный режим асинхронного электродвигателя имеет место при скольжениях, изменяющихся в пределах от 0 до 1, при этом число оборотов ротора изменяется от n1 до 0. Номинальная величина скольжения асинхронного электродвигателя составляет 0,03—0,1, причем первая цифра относится к более мощным, а вторая — к менее мощным электродвигателям (до 10—20 квт).
Очевидно, s = 0 в том случае, когда ротор вращается с синхронной скоростью n1. Можно считать, что на холостом ходу электродвигателя его ротор вращается с этой скоростью, если не учитывается трение.
Величина скольжения s =1, когда ротор электродвигателя не вращается при включенной обмотке статора. Этот режим называют режимом короткого замыкания электродвигателя (или режимом стоянки под током). Получить режим короткого замыкания можно, искусственно затормозив ротор или перегрузив электродвигатель до полной остановки его. Пуск асинхронного электродвигателя также начинается именно с этого режима.
Выражение (81) показывает, что скольжение может изменяться гораздо в больших пределах, чем указано выше. Действительно, ротор электродвигателя под действием постороннего источника механической энергии (например, под действием опускающегося груза) может вращаться со скоростью больше синхронной. В этом случае скольжение будет отрицательным (s<0). Отрицательное скольжение имеет место при работе асинхронного электродвигателя в генераторном режиме, когда, например, под действием опускающегося груза ротор вращается в ту же сторону, что и магнитное поле статора со скоростью n2>n1.
В этом случае скольжение будет отрицательным (s<0). Отрицательное скольжение имеет место при работе асинхронного электродвигателя в генераторном режиме, когда, например, под действием опускающегося груза ротор вращается в ту же сторону, что и магнитное поле статора со скоростью n2>n1.
Можно также представить, что ротор электродвигателя под действием опускающегося груза вращается в направлении, противоположном направлению вращения магнитного поля статора. В этом случае s>1, так как в выражение (81) величину п2 нужно подставить с отрицательным знаком. Такой режим называется режимом противовключения.
Таким образом, теоретически скольжение асинхронного электродвигателя может изменяться в пределах от —? до + ?. Практически же скольжение асинхронного электродвигателя при работе последнего в двигательном и тормозных режима« изменяется в пределах от —2 до +2.
Из курса электрических машин известно, что для асинхронного электродвигателя может быть составлена схема замещения, с помощью которой производится анализ работы электродвигателя и исследуются режимы его работы. На рис. 41 приведена упрощенная схема замещения асинхронного электродвигателя, в которой приняты следующие обозначения:
U1 — фазное напряжение обмотки статора, в;
I1 — фазный ток обмотки статора, а;
I0 — фазный ток холостого хода электродвигателя, а;
I2 — приведенный фазный ток обмотки ротора, а;
r1 и х1 — активное и индуктивное сопротивления фазы обмотки статора, ом;
r2’ и х2‘ — приведенные активное и индуктивное сопротивления фазы обмотки ротора, ом.
Для приведенных величин могут быть выведены следующие соотношения:
где т1 и т2 — число фаз обмоток статора и ротора;
к = U1н / E2н — коэффициент трансформации э. д. с. (U1н — номинальное фазное напряжение обмотки статора; E2н — фазная э. д. с. обмотки ротора при разомкнутых контактных кольцах).
Мощность Р1 забираемая электродвигателем из сети, определяется напряжением сети U1, током статора I1 зависящим от нагрузки, и коэффициентом мощности cos? т.е.
Мощность на валу электродвигателя зависит от его к. п. д.? и может быть вычислена по формуле
Если пренебречь механическими и вентиляционными потерями, которые незначительны, то можно считать, что механическая мощность асинхронного электродвигателя (мощность на валу) равна, потерям мощности в сопротивлении схемы замещения, приведенной на рис. 41, т. е.
41, т. е.
где т2 = т1 — приведенное число фаз обмотки ротора.
Между токами асинхронного электродвигателя, согласно схеме замещения, существует зависимость
Ток статора асинхронных электродвигателей I1 очень велик даже при отсутствии нагрузки на валу. Это объясняется тем, что намагничивающий ток этих электродвигателей составляет 50—70% номинального тока статора.
Особенности работы асинхронных двигателей | Публикации
Традиционно для кранового электропривода применяются специально разработанные серии электродвигателей переменного и постоянного тока. По геометрии магнитопровода, степени использования электротехнических материалов, электромеханическим характеристикам и конструктивному исполнению такие электродвигатели существенно отличаются от двигателей общепромышленного исполнения.
Режим работы электродвигателей в крановом электроприводе характеризуется широким изменением нагрузок, частыми пусками и торможениями, широким диапазоном изменения скорости ниже и выше номинальной (в электроприводах постоянного тока и частотно- регулируемых электроприводах).
Крановые двигатели рассчитаны для работы в повторно-кратковременном режиме, который характеризуется продолжительностью включения (ПВ) 15, 25, 40 и 60% при продолжительности цикла не более 10 мин. Основным номинальным режимом крановых двигателей переменного тока является ПВ=40%.
Из-за высоких требований к динамике двигателей в переходных процессах пуска и торможения и для снижения расхода энергии при этом двигатели конструируются таким образом, чтобы момент инерции ротора был, по возможности, минимальным. Снижение момента инерции достигается путем уменьшения высоты оси вращения при заданной мощности двигателя.
Электродвигатели имеют повышенный (по сравнению с электродвигателями общепромышленного исполнения) запас прочности механических узлов и деталей. Крепление пакета ротора на валу всегда производится при помощи шпонки.
Традиционно, основное применение в крановых электроприводах находят асинхронные двигатели с фазным ротором. Регулирование скорости и момента в электроприводах с такими двигателями производится включением в цепь ротора пускорегулирующих резисторов. Для получения пониженных (посадочных) скоростей опускания груза применяется режим противовключения или различные специальные схемы включения (например – динамического торможения самовозбуждением).
Для получения пониженных (посадочных) скоростей опускания груза применяется режим противовключения или различные специальные схемы включения (например – динамического торможения самовозбуждением).
Существуют также модификации крановых асинхронных двигателей с короткозамкнутым ротором (при мощности до 30 кВт) для применения в электроприводах, имеющих, как правило, низкие номинальные скорости и не требующие их регулирования. Кроме того, существуют модификации крановых электродвигателей в двух и трехскоростном исполнении.
Все эти двигатели рассчитаны на питание от промышленной сети стандартного напряжения 220/ 380 В при частоте 50 Гц. Хотя это не означает, что они не могут работать в составе частотно- регулируемых электроприводов, тем не менее, в последнее время разрабатываются специальные серии асинхронных двигателей, в том числе и крановых, оптимизированные для работы в системах частотного регулирования.
Таким образом, крановые асинхронные двигатели в настоящее время условно можно разделить на электродвигатели с фазным и короткозамкнутым ротором, предназначенные для питания от промышленной сети, и короткозамкнутые электродвигатели для частотно- регулируемых электроприводов.
Крановые асинхронные двигатели с фазным и короткозамкнутым ротором, предназначенные для питания от промышленной сети
Отечественной промышленностью выпускаются асинхронные крановые электродвигатели с фазным и короткозамкнутым ротором, одно- и двухскоростные. Для применения на кранах общего назначения выпускаются электродвигатели с классом нагревостойкости изоляции F, для кранов и агрегатов металлургического производства — класса H.
Основные серии двигателей: фазные — MTF, MTH, 4MTF, 4MTH, 4MTM и короткозамкнутые – MTKF, MTKH, 4MTKF, 4MTKH. Короткозамкнутые электродвигатели выпускаются мощностью до 30 кВт. Кроме того, для малых мощностей выпускаются двигатели DMTF, DMTKH, AMTF, AMTKH.
Двухскоростные двигатели выпускаются сериями MTKH, 4MTKH и 5АТ.
Двигатели представлены в шести-, восьми- и десятиполюсном исполнениях. Быстроходные обмотки двухскоростных двигателей выпускаются также в четырехполюсном исполнении.
Основное конструктивное исполнение двигателей — горизонтальное на лапах с одним концом вала. Двигатели серии 4МТ отличаются от двигателей серии МТ установочно- присоединительными размерами, двигатели 4МТ выпускаются в соответствии с нормами МЭК.
Двигатели серии 4МТ отличаются от двигателей серии МТ установочно- присоединительными размерами, двигатели 4МТ выпускаются в соответствии с нормами МЭК.
Электродвигатели всех габаритов изготавливаются в закрытом обдуваемом исполнении, двигатели мощностью свыше 45 кВт, кроме того, в защищенном исполнении с независимой вентиляцией от внешнего вентилятора с электроприводом.
Следуют отметить, что крановые электродвигатели большинство времени работают на номинальных скоростях, где эффективность самовентиляции велика. Поэтому независимая вентиляции в крановых двигателях применяется в электроприводах интенсивного режима работы, где велика доля пусковых и тормозных потерь, и где ее применение позволяет избежать увеличения статической мощности.
Представляет интерес возможность использования крановых асинхронных двигателей с фазным и короткозамкнутым ротором предназначенных для питания от промышленной сети в составе частотно-регулируемого электропривода. В настоящее время имеется положительный опыт эксплуатации асинхронных двигателей мощностью до 55 кВт с закороченным фазным ротором при питании от преобразователей частоты. Такое техническое решение принималось при модернизации кранов, оборудованных традиционными системами кранового электропривода на базе асинхронного двигателя с фазным ротором. Для снижения стоимости такой модернизации сохранялись электродвигатели и, в ряде случаев, пускорегулирующие резисторы, которые применялись в качестве тормозных.
Такое техническое решение принималось при модернизации кранов, оборудованных традиционными системами кранового электропривода на базе асинхронного двигателя с фазным ротором. Для снижения стоимости такой модернизации сохранялись электродвигатели и, в ряде случаев, пускорегулирующие резисторы, которые применялись в качестве тормозных.
Электродвигатель с фазным ротором, выбранный для работы в традиционной системе кранового электропривода с реостатным регулированием при переводе его на питание от преобразователя частоты (если режим работы механизма не превышается), всегда имеет меньший уровень пусковых потерь. При векторном управлении, как правило, снижаются потери и в установившемся режиме, так как при частичной нагрузке в электроприводе производится оптимизация энергопотребления.
Короткозамкнутые крановые электродвигатели серий МТ и 4МТ мощностью до 30 кВт достаточно широко применяются при создании крановых электроприводов механизмов горизонтального перемещения (например, на башенных кранах), а в ряде случаев и в электроприводах механизмов подъема.
Частотно-регулируемые крановые электродвигатели
Работа асинхронных двигателей в системах частотного регулирования имеет свои особенности. Прежде всего, при частотном управлении значительно снижаются потери энергии в двигателях в пуско-тормозных режимах. Это позволяет переходить на более высокооборотные электроприводы, и при проектировании двигателей основное внимание уделять снижению потерь в обмотках двигателя в номинальном режиме. При проектировании двигателей для системы частотного регулирования учитывается следующее:
- Основные соотношения между геометрическими размерами, принятые для крановых асинхронных двигателей, сохраняются, поскольку определяющим здесь является режим работы, а не система регулирования.
- В современных частотно-регулируемых электроприводах с векторным управлением механические характеристики формируется системой управления преобразователя. Поэтому при проектировании электродвигателей, предназначенных для работы только с преобразователями частоты, можно не предпринимать специальные меры для повышения перегрузочной способности и пускового момента.

- Оптимальные частоты вращения двигателей в системах частного регулирования, как уже было сказано, выше, чем в обычных системах, и составляют 1900-1800 об/мин для легкого и среднего режимов работы и до 1000 — 800 об/мин — для тяжелого режима. Однако при проектировании следует согласовывать максимальную частоту вращения разрабатываемого электропривода и максимальную допустимую частоту вращения редуктора.
- Двигатели должны быть работоспособны при повышении частоты выходного напряжения преобразователя в 1,5-2 раза по отношению к номинальной частоте.
- С целью снижения потерь обмотка ротора двигателя заливается чистым алюминием или выполняется медной, скольжение при этом — минимальное. Регулирование выходного напряжения и частоты двигателя позволяет оптимизировать использование его активных частей и обеспечить работу двигателя в режиме минимальных потерь.
- Возможно исполнение двигателей на нестандартное напряжение, соответствующее выходному напряжению преобразователя частоты.


Все эти мероприятия, а также оптимальное разграничение зон регулирования, позволяют при одинаковой нагрузке снизить в 1,5-1,8 раза мощность двигателя в частотно-регулируемом приводе.
Специальная серия крановых двигателей для частотно-регулируемых электроприводов выпускается отечественной промышленностью. Эта серия включает в себя двигатели типа АД2КД мощностью от 4 до 11 кВт в шести- и четырехполюсном исполнениях с пристроенными дисковыми тормозами и двигатели 4МТКД мощностью от 22 до 110 кВт в шести- и восьмиполюсном исполнениях. Двигатели 4МТКД выполнены с использованием основных узлов традиционных двигателей серии 4МТН и изготавливаются в закрытом обдуваемом исполнении, а также с вентиляцией, не зависимой от внешнего вентилятора с электроприводом.
Принцип работы и типы асинхронных двигателей
Асинхронные двигатели являются наиболее часто используемыми двигателями во многих приложениях. Их также называют асинхронными двигателями , потому что асинхронный двигатель всегда работает со скоростью ниже синхронной. Синхронная скорость означает скорость вращения магнитного поля в статоре.
Синхронная скорость означает скорость вращения магнитного поля в статоре.
В основном существует 2 типа асинхронных двигателей в зависимости от типа входного питания — (i) однофазный асинхронный двигатель и (ii) трехфазный асинхронный двигатель.
Или они могут быть разделены по типу ротора — (i) двигатель с короткозамкнутым ротором и (ii) двигатель с контактным кольцом или с обмоткой
Основной принцип работы асинхронного двигателя
В двигателе постоянного тока питание необходимо для обмотки статора, а также для обмотки ротора. Но в асинхронном двигателе переменным током питается только обмотка статора.
- Из-за питания переменным током вокруг обмотки статора создается переменный поток. Этот переменный поток вращается с синхронной скоростью. Вращающийся поток называется «вращающимся магнитным полем» (RMF).
-
Относительная скорость между RMF статора и проводниками ротора вызывает ЭДС индукции в проводниках ротора в соответствии с законом электромагнитной индукции Фарадея.
Проводники ротора замыкаются накоротко, и, следовательно, ток ротора возникает из-за ЭДС индукции. Поэтому такие двигатели называются асинхронными двигателями . (Это действие такое же, как и в трансформаторах, поэтому асинхронные двигатели можно назвать вращающимися трансформаторами .)
- Теперь индуцированный ток в роторе также создаст переменный поток вокруг него. Этот поток ротора отстает от потока статора. Направление индуцированного тока ротора, согласно закону Ленца, таково, что он будет стремиться противодействовать причине его возникновения.
- Поскольку причиной возникновения тока ротора является относительная скорость между вращающимся потоком статора и ротором, ротор будет пытаться догнать RMF статора. Таким образом, ротор вращается в том же направлении, что и поток статора, чтобы минимизировать относительную скорость. Однако ротору никогда не удается догнать синхронную скорость. это основной принцип работы асинхронного двигателя любого типа, однофазный или трехфазный.
 Проводники ротора замыкаются накоротко, и, следовательно, ток ротора возникает из-за ЭДС индукции. Поэтому такие двигатели называются асинхронными двигателями .
Проводники ротора замыкаются накоротко, и, следовательно, ток ротора возникает из-за ЭДС индукции. Поэтому такие двигатели называются асинхронными двигателями . 
Синхронная скорость:
Скорость вращения вращающегося магнитного поля называется синхронной скоростью.
где, f = частота подачи
P = количество полюсов
Скольжение:
Ротор пытается догнать синхронную скорость поля статора и поэтому вращается. Но на практике ротор никогда не догоняет. Если ротор догоняет скорость статора, не будет никакой относительной скорости между потоком статора и ротором, следовательно, не будет индуцированного тока ротора и не будет создаваться крутящий момент для поддержания вращения. Однако это не остановит двигатель, ротор замедлится из-за потери крутящего момента, крутящий момент снова будет возникать из-за относительной скорости. Поэтому ротор вращается со скоростью, которая всегда меньше синхронной скорости.
Разница между синхронной скоростью (N s ) и фактической скоростью (N) ротора называется скольжением.
Новое сообщение
Старый пост
Дом
[№.
 36] Некоторые существенные особенности асинхронного двигателя – 1
36] Некоторые существенные особенности асинхронного двигателя – 1
Рис. 1
В столбце 34 мы вывели несколько неотъемлемых особенностей синхронного реактивного двигателя, просто проверив его поперечное сечение и приняв во внимание основные пути потока, и здесь мы сделайте то же самое для асинхронного двигателя, рис. 1. Чтобы стимулировать внимательное изучение чертежа и использовать общепринятую терминологию, рис. 1 представлен без надписей.
Начнем со статора — подождите, что такое «статор»? Это ионная часть stat или stat ic, точно так же, как ротор — это часть rot ating. На рис. 1 статор находится снаружи, а ротор внутри (но есть несколько экземпляров асинхронных двигателей, в которых ротор находится снаружи, а статор внутри). Ротор и статор по существу имеют цилиндрическую форму и разделены воздушным зазором, который на рис. 1 явно очень мал по сравнению с диаметром ротора.
Посмотрим на статор. Мы можем видеть цветные концевые обмотки, которые соединяют стороны катушки между двумя пазами. Стороны катушки, идущие вдоль пазов, видны только как точки. Имеется 36 пазов, и каждая катушка имеет размах 8 пазов или 8 шагов пазов. Поскольку имеется 36 катушек, каждая с двумя сторонами катушки, в каждом слоте есть 2 стороны катушки, и это называется двухслойной обмоткой. В этом случае одна сторона катушки находится в нижней части прорези, а другая — в верхней части другой прорези. То, как это достигается, является одним из чудес производства электродвигателей. Есть несколько способов, и один из самых элегантных, которые мы видим в настоящее время в автомобильных тяговых двигателях, — это шпильочная обмотка. Поищите в интернете «шпильочная обмотка в электродвигателях», и вы увидите много замечательных примеров.
Мы можем видеть цветные концевые обмотки, которые соединяют стороны катушки между двумя пазами. Стороны катушки, идущие вдоль пазов, видны только как точки. Имеется 36 пазов, и каждая катушка имеет размах 8 пазов или 8 шагов пазов. Поскольку имеется 36 катушек, каждая с двумя сторонами катушки, в каждом слоте есть 2 стороны катушки, и это называется двухслойной обмоткой. В этом случае одна сторона катушки находится в нижней части прорези, а другая — в верхней части другой прорези. То, как это достигается, является одним из чудес производства электродвигателей. Есть несколько способов, и один из самых элегантных, которые мы видим в настоящее время в автомобильных тяговых двигателях, — это шпильочная обмотка. Поищите в интернете «шпильочная обмотка в электродвигателях», и вы увидите много замечательных примеров.
Катушки уложены группами по три: красная, красная, красная, затем синяя, синяя, синяя, затем зеленая, зеленая, зеленая; и этот шаблон повторяется четыре раза на 360 °, двигаясь против часовой стрелки. Цвета обозначают три фазы UVW, и если мы назначим U=красный, V=зеленый, W=синий, мы обозначим всю обмотку (в направлении против часовой стрелки):
Цвета обозначают три фазы UVW, и если мы назначим U=красный, V=зеленый, W=синий, мы обозначим всю обмотку (в направлении против часовой стрелки):
UUU WWW VVV UUU WWW VVV UUU WWW VVV UUU WWW VVV
Заказ важен! В трехфазной машине пространственный порядок фазных обмоток определяет направление вращения, и если три синусоидальных фазных тока находятся в своей нормальной фазе последовательность UVW во времени, может показаться, что наша последовательность намотки обратная: UWV вместо UVW. Разве порядок не должен быть UVW, идущим против часовой стрелки?
Чтобы понять это немного лучше, нам нужно посмотреть на количество полюсов.
Количество полюсов в асинхронном двигателе неочевидно. Нет никаких магнитов или обмоток возбуждения, которые нужно считать. Ротор имеет 30 пазов, но количество полюсов точно не 30. И уж точно не 15 (30/2). В любом случае к ротору ничего не подключено, поэтому определить количество полюсов он никак не может. Так что же определяет количество полюсов?
Обмотка статора определяет количество полюсов. Ключевым признаком, на который следует обратить внимание, является количество групп катушек в одной фазе, скажем, в красной фазе U. Катушки уложены группами по три, а групп всего четыре. Это означает, что четыре полюса .
Ключевым признаком, на который следует обратить внимание, является количество групп катушек в одной фазе, скажем, в красной фазе U. Катушки уложены группами по три, а групп всего четыре. Это означает, что четыре полюса .
Если у нас 4 полюса, шаг полюсов равен 360°/4 = 90°. Это точно соответствует 9 слотам. Мы называем это число слотов на полюс . Поскольку это целое число, мы называем статор интегральным слотом 9.0079 статор.
Мы уже отметили, что каждая катушка занимает 8 пазов, а не 9. (Катушка, охватывающая 9 слотов, будет катушкой с полным шагом ). Кроме того, три катушки, принадлежащие одной группе, разнесены или распределены по под определенным углом, а число пазов на полюс на фазу равно 9/3 = 3. значение на рис. 1 равно 3 × 360/36 = 30°. Этот угол определяет то, что мы называем фазовый ремень , и мы можем идентифицировать фазовый ремень, посчитав 3 красных стороны катушки вместе в отверстии статора и взяв угол между центральными линиями зубьев с каждой стороны этой группы, то есть 3 шага пазов. или 30°. Важно понимать угол фазового пояса как три шага прорезей, а не два (именно так мы могли бы подумать, если мы «прыгаем» с первой красной стороны катушки на третью красную сторону катушки).
или 30°. Важно понимать угол фазового пояса как три шага прорезей, а не два (именно так мы могли бы подумать, если мы «прыгаем» с первой красной стороны катушки на третью красную сторону катушки).
Теперь давайте немного подумаем. Вы можете закрыть глаза на этот бит: это может помочь. Давайте зададим себе вопрос: как далеко мы ожидаем, что ротор будет вращаться за один цикл частоты сети переменного тока ? Логичный ответ, конечно, два поула. Это, конечно, означало бы, что все в машине выглядело бы точно так же — все выравнивания, все симметрии, все детали чертежа, а также схема потока и распределение амперпроводников были бы точно воспроизведены после поворота два полюса. И после еще одного поворота двух полюсов, и еще, рисунок будет выглядеть точно так же.
Это интуитивное объяснение того, что мы называем синхронной скоростью . Это число циклов в секунду, умноженное на количество пар полюсов — , или ƒ p об/сек, где ƒ — частота, а p — количество пар полюсов.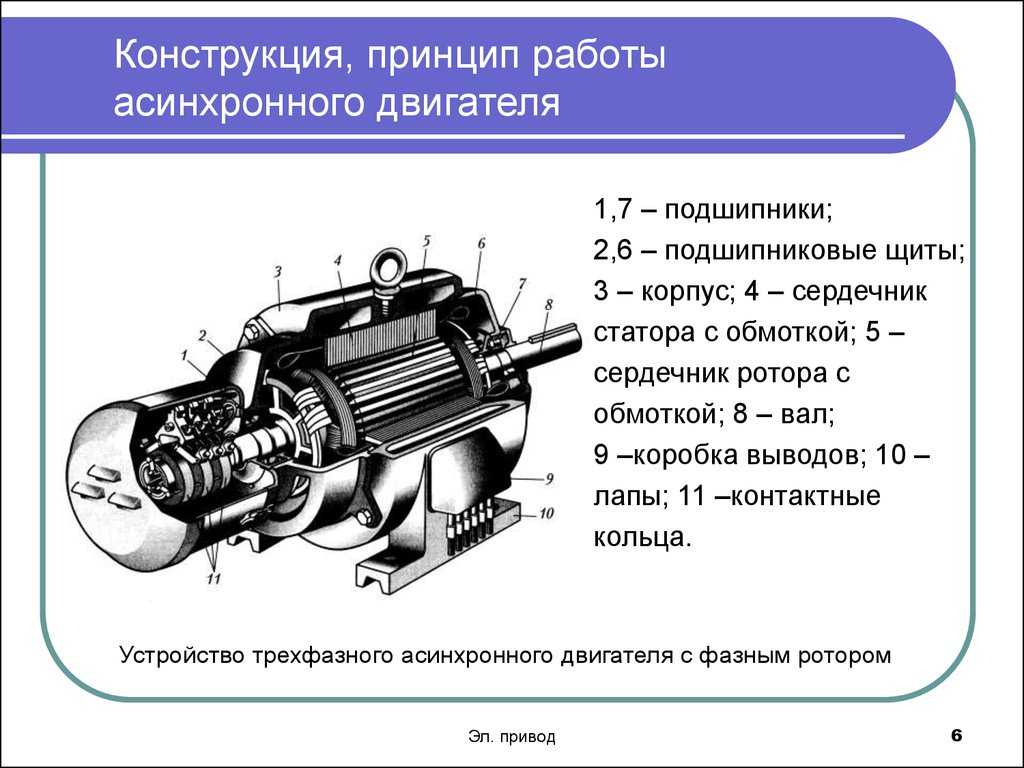 Это скорость, с которой вращается картина потока и распределение амперпроводника. Почему пары полюсов, а не полюса? Полюса идут парами (NS), и полный пространственный цикл охватывает два шага полюсов. За один полный цикл частоты переменного тока вращение на синхронной скорости пройдет 360/ p градусов, а полный оборот он покроет за p циклов частоты питания.
Это скорость, с которой вращается картина потока и распределение амперпроводника. Почему пары полюсов, а не полюса? Полюса идут парами (NS), и полный пространственный цикл охватывает два шага полюсов. За один полный цикл частоты переменного тока вращение на синхронной скорости пройдет 360/ p градусов, а полный оборот он покроет за p циклов частоты питания.
Теперь предположим, что мы хотим, чтобы двигатель на рис. 1 вращался против часовой стрелки, и предположим, что последовательность фаз UVW или красный, зеленый, синий. Ток в зеленой фазе V достигнет пикового значения через одну треть цикла во времени после пика в красной фазе U. За одну треть цикла вращение с синхронной скоростью составит 1/3 × 360°/ р , а так 2 p = 4 (определено нашей обмоткой), мы имеем p = 2 и, таким образом, это вращение 120/ p = 60°.
Таким образом, чтобы вращаться против часовой стрелки, мы ожидаем найти зеленую фазу (V), расположенную на 60° вокруг красной фазы (U), идущую против часовой стрелки. В этом месте я попрошу вас, дорогой читатель, изучить рис. 1 и убедиться, что зеленая фаза именно там, где она должна быть. В качестве подсказки начните с любой катушки красной фазы и отсчитайте 60° или 6 шагов щели в направлении против часовой стрелки. Вы должны найти катушку, принадлежащую зеленой фазе, и эта катушка должна находиться в таком же позиционном отношении относительно других катушек зеленой фазы, как красная пусковая катушка была к другим катушкам красной фазы.
В этом месте я попрошу вас, дорогой читатель, изучить рис. 1 и убедиться, что зеленая фаза именно там, где она должна быть. В качестве подсказки начните с любой катушки красной фазы и отсчитайте 60° или 6 шагов щели в направлении против часовой стрелки. Вы должны найти катушку, принадлежащую зеленой фазе, и эта катушка должна находиться в таком же позиционном отношении относительно других катушек зеленой фазы, как красная пусковая катушка была к другим катушкам красной фазы.
Это важное упражнение. Я бы сказал, что студент должен решить это в своем уме — и, конечно же, дать тот же ответ, что и профессор! Надеюсь, я не ошибся в рисунке. Я уверен, что это нормально. Если нет, мне кто-нибудь напишет (надеюсь). Но за словами может быть сложнее следить, чем за диаграммой. Важно уяснить себе эти основные понятия, и нужно сказать, что многие учебники начинаются с довольно академического или абстрактного уровня, предполагая, что читатель уже имеет эти понятия. Лучше всего посетить обмоточную мастерскую или мастерскую по ремонту обмоток и спросить у техников, как они определяют порядок фаз относительно требуемого направления вращения.
Терминология также важна, чтобы мы могли обсудить все дело друг с другом. Может быть, мне следовало поставить метки на диаграмме, чтобы избежать недоразумений. Если бы я поставил метки, могло бы показаться, что диаграмма не требует пояснений. Но это не так. Как и многие инженерные схемы, она требует интерпретации и воображения со стороны читателя. Надеюсь, я не уклоняюсь от своего долга учителя. Наоборот, хороший учитель обязательно должен ставить упражнения! Легкие? Может быть, а может и нет.
В следующий раз мы начнем разбираться в реальной работе асинхронного двигателя. Если подумать, мы до сих пор обсуждали только обмотку, и эта обмотка могла бы работать так же хорошо с синхронным двигателем, таким как IPM или двигатель с возбуждением. В синхронном двигателе ротор вращается синхронно с вращающимся магнитным потоком и распределением амперпроводников с синхронной скоростью. Но не в асинхронном двигателе.
Обратите внимание, что все углы в этой статье даны в механических градусах (не в электрических градусах).