Содержание
✔ Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
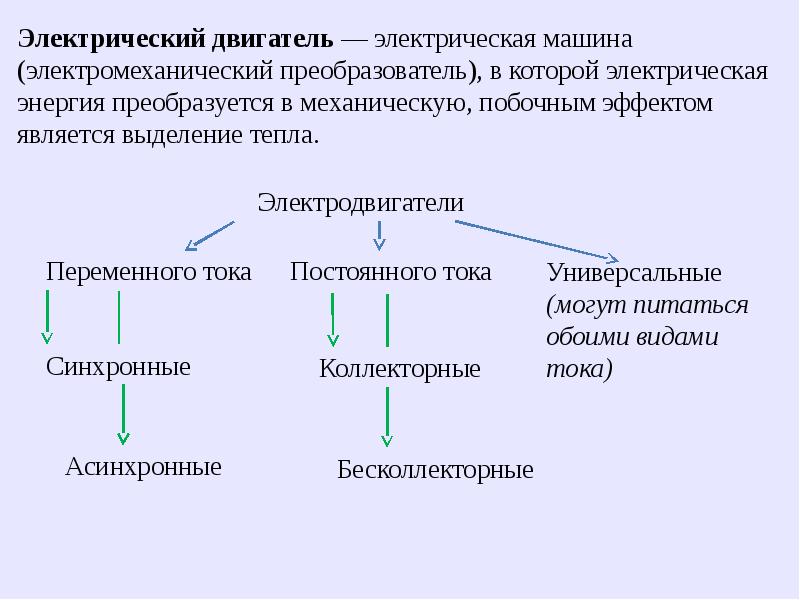
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
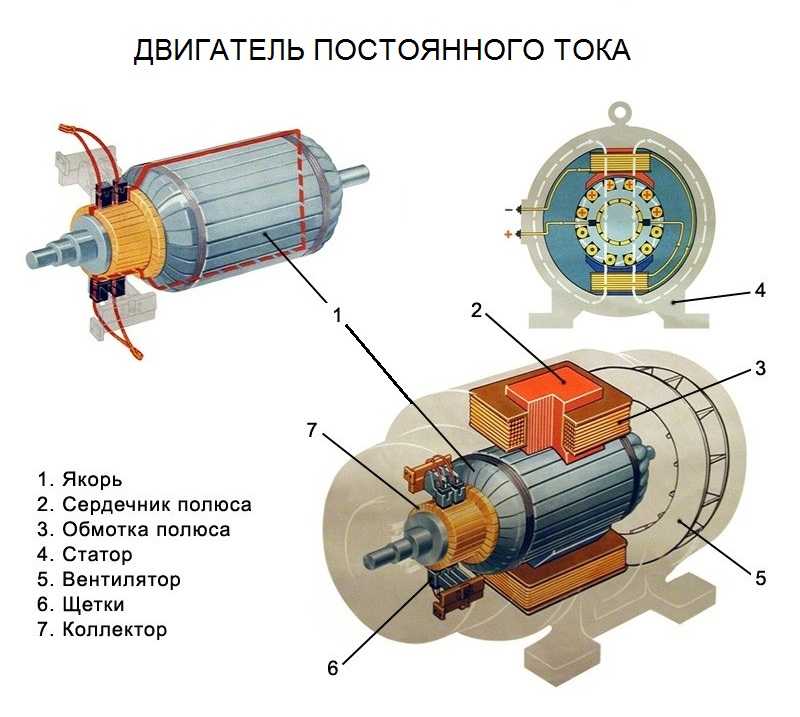
Электродвигатели постоянного тока
Используются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т. д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
Шаговые электродвигатели
Действуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
Серводвигатели
Относятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
Линейные электродвигатели
Обладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
Синхронные двигатели
Являются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
Асинхронные двигатели
Также, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Перейти в каталог электродвигаетелей
История создания электродвигателя
Первые эксперименты с электромагнитными устройствами
Электромеханика является относительно молодой, по историческим меркам, отраслью науки и техники.
1800, Вольта
Итальянский физик, химик и физиолог, Алессандро Вольта, первый в мире создал химический источник тока.
1820, Эрстед
Датский ученый, физик, Ханс Кристиан Эрстед, обнаружил на опыте отклоняющее действие тока на магнитную стрелку.
1821, Фарадей
Первый электродвигатель Фарадея, 1821 г.
Британский физик-экспериментатор и химик, Майкл Фарадей, опубликовал трактат «О некоторых новых электромагнитных движениях и о теории магнетизма», где описал, как заставить намагниченную стрелку непрерывно вращаться вокруг одного из магнитных полюсов. Эта конструкция впервые реализовала непрерывное преобразование электрической энергии в механическую. Принято считать ее первым электродвигателем в истории.
1822, Ампер
Французский физик, Андре Мари Ампер, открыл магнитный эффект соленоида (катушки с током), откуда следовала идея эквивалентности соленоида постоянному магниту. Среди прочего Ампер предложил использовать железный сердечник, помещенный внутрь соленоида, для усиления магнитного поля. В 1820 году им был открыт закон Ампера.
1822, Барлоу
Английский физик и математик, Питер Барлоу, изобрел колесо Барлоу, по сути, униполярный электродвигатель.
1825, Араго
Французский физик и астроном, Доминик Франсуа Жан Араго, опубликовал опыт показывающий, что вращающийся медный диск заставляет вращаться магнитную стрелку, подвешенную над ним.
1825, Стёрджен
Британский физик, электротехник и изобретатель, Уильям Стёрджен, в 1825 изготовил первый электромагнит, который представлял из себя согнутый стержень из мягкого железа с обмоткой из толстой медной проволоки.
Вращающееся устройство Йедлика, 1827/28 гг.
1827, Йедлик
Венгерский физик и электротехник, Аньош Иштван Йедлик, изобрел первую в мире динамо-машину (генератор постоянного тока), однако практически не объявлял о своем изобретении до конца 1850-х годов.
1831, Фарадей
Английский физик, Майкл Фарадей, открыл электромагнитную индукцию, то есть явление возникновения электрического тока в замкнутом контуре при изменении магнитного потока, проходящего через него. Формулировка закона электромагнитной индукции.
1831, Генри
Американский физик, Джозеф Генри, независимо от Фарадея обнаружил взаимоиндукцию, но Фарадей раньше опубликовал свои результаты.
1832, Пикси
Генератор постоянного тока Пикси
Француз, Ипполит Пикси, сконструировал первый генератор переменного тока. Устройство состояло из двух катушек индуктивности с железным сердечником напротив которых располагался вращающийся магнит подковообразной формы, который приводился в движение вращением рычага. Позже для получения постоянного пульсирующего тока к этому устройству был добавлен коммутатор.
Устройство состояло из двух катушек индуктивности с железным сердечником напротив которых располагался вращающийся магнит подковообразной формы, который приводился в движение вращением рычага. Позже для получения постоянного пульсирующего тока к этому устройству был добавлен коммутатор.
Электродвигатель Стёрджена
Strurgejn’s Annals of Electricity, 1836/37, vol. 1
1833, Стёрджен
Британский физик, Уильям Стёрджен, публично продемонстрировал электродвигатель на постоянном токе в Марте 1833 года в Аделаидской галерее практической науки в Лондоне. Данное изобретение считается первым электродвигателем, который можно было использовать.
1833, Ленц
В начале в электромеханике разграничивали магнито-электрические машины (электрические генераторы) и электро-магнитные машины (электрические двигатели). Российский физик (немецкого происхождения), Эмилий Христианович Ленц, опубликовал статью о законе взаимности магнито-электрических явлений, то есть о взаимозаменяемости электрического двигателя и генератора.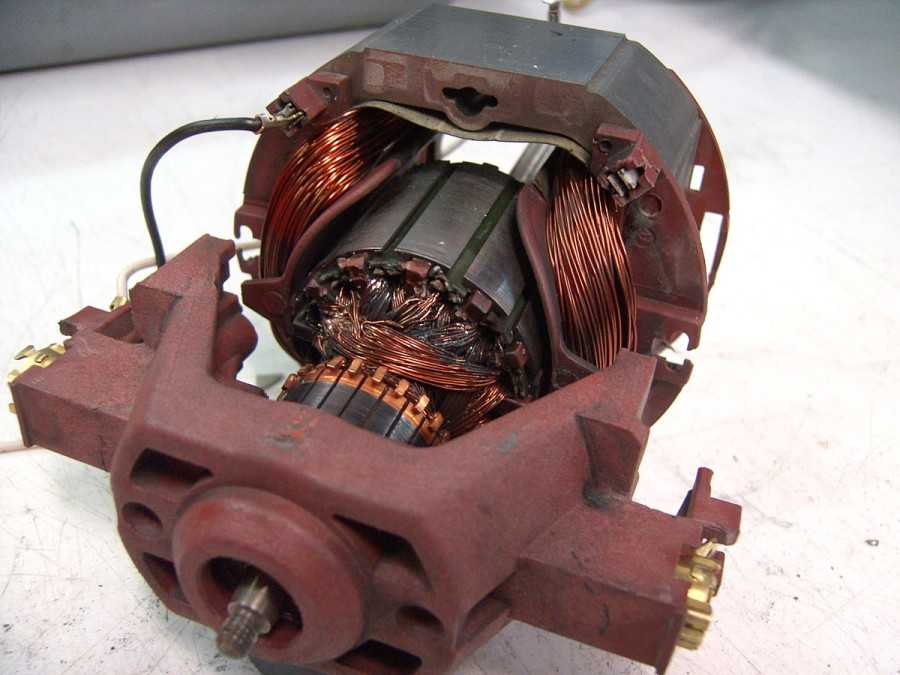
Первые реальные электрические двигатели
Май 1834, Якоби
Первый вращающийся электродвигатель. Якоби, 1834
Немецкий и русский физик, академик Императорской Санкт-Петербургской Академии Наук, Борис Семенович (Мориц Герман фон) Якоби, изобрел первый в мире электродвигатель с непосредственным вращением рабочего вала. Мощность двигателя составляла около 15 Вт, частота вращения ротора 80-120 оборотов в минуту. До этого изобретения существовали только устройства с возвратно-поступательным или качательным движением якоря.
1836 — 1837, Дэвенпорт
Проводя эксперименты с магнитами, американский кузнец и изобретатель, Томас Дэвенпорт, создает свой первый электромотор в июле 1834 года. В декабре этого же года он впервые продемонстрировал свое изобретение. В 1837 году Дэвенпорт получил первый патент (патент США №132) на электрическую машину.
1839, Якоби
Используя электродвигатель питающийся от 69 гальванических элементов Грове и развивающий 1 лошадиную силу, в 1839 г.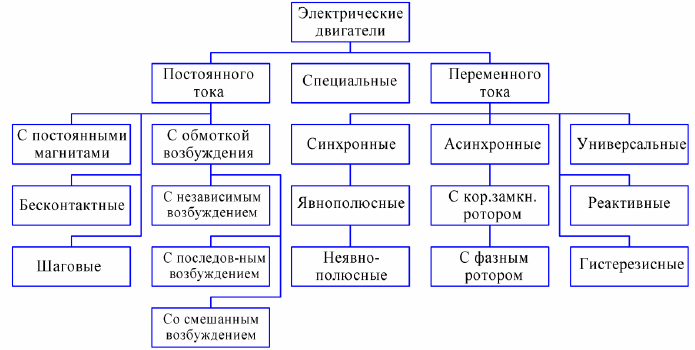 Якоби построил лодку способную двигаться с 14 пассажирами по Неве против течения. Это было первое практическое применение электродвигателя.
Якоби построил лодку способную двигаться с 14 пассажирами по Неве против течения. Это было первое практическое применение электродвигателя.
1837 — 1842, Дэвидсон
Шотландский изобретатель, Роберт Дэвидсон, занимался разработкой электродвигателя с 1837 года. Он сделал несколько приводов для токарного станка и моделей транспортного средства. Дэвидсон изобрел первый электрический локомотив.
1856, Сименс
Немецкий инженер, изобретатель, ученый, промышленник, основатель фирмы Siemens, Вернер фон Сименс изобрел электрический генератор с двойным T-образным якорем. Он первый разместил обмотки в пазах.
1861-1864, Максвелл
Британский физик, математик и механик, Джеймс Клерк Максвелл, обобщил знания об электромагнетизме в четырех фундаментальных уравнениях. Вместе с выражением для силы Лоренца уравнения Максвелла образуют полную систему уравнений классической электродинамики.
1871-1873, Грамм
Бельгийский изобретатель, Зеноб Теофил Грамм, устранил недостаток электрических машин с двух-Т-образным якорем Сименса, который заключался в сильных пульсациях вырабатываемого тока и быстром перегреве. Грамм предложил конструкцию генератора с самовозбуждением, который имел кольцевой якорь.
Грамм предложил конструкцию генератора с самовозбуждением, который имел кольцевой якорь.
1885, Феррарис
Итальянский физик и инженер, Галилео Феррарис, изобрел первый двухфазный асинхронный электродвигатель. Однако Феррарис думал, что такой двигатель не сможет иметь КПД выше 50%, поэтому он потерял интерес и не продолжал улучшать асинхронный электродвигатель. Считается, что Феррарис первым объяснил явление вращающегося магнитного поля.
1887, Тесла
Американец сербского происхождения, изобретатель, Никола Тесла, работая независимо от Феррариса, изобрел и запатентовал двухфазный асинхронный электродвигатель с явно выраженными полюсами статора (сосредоточенными обмотками). Тесла ошибачно считал что двухфазная система токов оптимальна с экономической точки зрения среди всех многофазных систем.
1889-1891, Доливо-Добровольский
Русский электротехник польского происхождения, Михаил Осипович Доливо-Добровольский, прочитав доклад Феррариса о вращающемся магнитном поле изобрел ротор в виде «беличьей клетки». Дальнейшая работа в этом направлении привела к разработке трехфазной системы переменных токов и трехфазного асинхронного электродвигателя, получившего широкое применение в промышленности и практически не изменившегося до нашего времени.
Дальнейшая работа в этом направлении привела к разработке трехфазной системы переменных токов и трехфазного асинхронного электродвигателя, получившего широкое применение в промышленности и практически не изменившегося до нашего времени.
Широкое внедрение электромеханических устройств в России начинается после Октябрьской революции 1917 г., когда электрификация всей страны стала основой технической политики нового государства. Можно сказать, что XX век стал веком становления и широкого распространения электромеханики.
Выбор между двухфазной и трехфазной системой
Доливо-Добровольский справедливо считал, что увеличение числа фаз в двигателе улучшает распределение намагничивающей силы по окружности статора. Переход к трехфазной системы от двухфазной уже дает большой выигрыш в этом отношении. Дальнейшее увеличение числа фаз нецелесообразно, так как приводит к значительному увеличению расходов металла на провода.
Для Теслы же казалось очевидным, что чем меньше число фаз, тем меньше требуется проводов, и следовательно тем дешевле устройство электропередачи.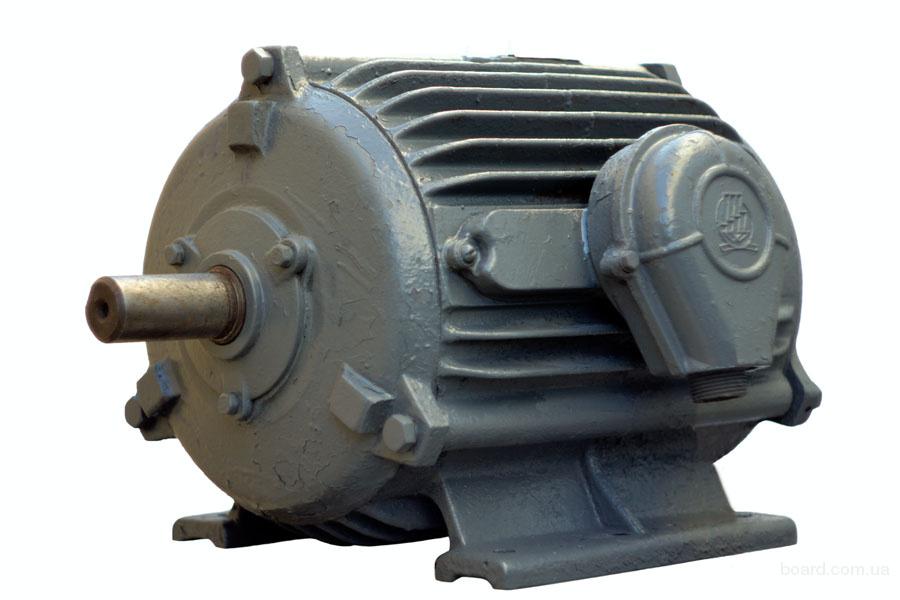 При этом двухфазная система передачи требовала применения четырех проводов, что представлялось не желательным в сравнении с двух проводными системами постоянного или однофазного переменного токов. Поэтому Тесла предлагал применять трех проводную линию для двухфазной системы, делая один провод общим. Но это не сильно уменьшало количество затрачиваемого на систему металла, так как общий провод должен был быть большего сечения.
При этом двухфазная система передачи требовала применения четырех проводов, что представлялось не желательным в сравнении с двух проводными системами постоянного или однофазного переменного токов. Поэтому Тесла предлагал применять трех проводную линию для двухфазной системы, делая один провод общим. Но это не сильно уменьшало количество затрачиваемого на систему металла, так как общий провод должен был быть большего сечения.
Таким образом трехфазная система токов предложенная Доливо-Добровольским была оптимальной для передачи энергии. Она практически сразу нашла широкое применение в промышленности и до наших дней является основной системой передачи электрической энергии во всем мире.
17 Различные типы электродвигателей
Машина, преобразующая электрическую энергию в механическую, называется электродвигателем. Взаимодействие магнитного поля и электрического тока в обмотке катушки в большинстве случаев приводит в движение двигатели. В результате этого он создает силу в виде крутящего момента, передаваемого на вал двигателя.
Источники постоянного тока, такие как батареи или выпрямители, и/или источники переменного тока, такие как электрические сети, инверторы или электрические генераторы, используются для питания электродвигателей. Тип источника питания, конструкция, применение и тип выходной скорости — все это факторы, которые можно использовать для классификации двигателей. Расположение проводников и поля в некоторых типах электродвигателей различаются. Он также регулирует механический выходной крутящий момент, скорость и положение, которые можно использовать.
Современные электродвигатели могут обеспечить надежную механическую энергию для промышленных применений. Вентиляторы, воздуходувки и насосы, а также станки, транспортные средства и дисковые приводы — все это примеры промышленного применения. В электрических часах используются небольшие двигатели. В этой статье вы узнаете о 16 распространенных типах электродвигателей и их функциях.
Дополнительная информация: Серводвигатель
Содержание
- 1 Типы электродвигателей
- 1.
 1 AC Motor
1 AC Motor - 1.2 Induction motor
- 1.3 1-phase induction motor
- 1.4 3-phase induction motor
- 1.5 Series motor
- 1.6 Join our Newsletter
- 1.7 Compound motor
- 1.8 PDMC motor
- 1.9 Синхронный двигатель
- 1.10 Шаговый двигатель
- 1.11 Бесщеточный двигатель
- 1.12 Универсальный двигатель
- 1.13 Гистерезисный двигатель
- 1.14 Реактивный двигатель
- 1.95 Линейный двигатель0022
- 1.16 Двигатель постоянного тока
- 1.17 Шунтирующий двигатель
- 1.18 Двигатель с независимым возбуждением
- 1.
- 2 Заключение
- 2.1 Пожалуйста, поделитесь!
 1 AC Motor
1 AC Motor Types of Electric Motors
The following are the common types of electric motors:
- DC Motor
- Shunt motor
- Separately excited motor
- Series motor
- Compound motor
- PDMC motor
- AC Двигатель
- Induction motor
- 1-phase induction motor
- 3-phase induction motor
- Synchronous motor
- Stepper motor
- Brushless motor
- Universal motor
- Hysteresis motor
- Reluctance m Motor
- Linear Motor
AC Motor
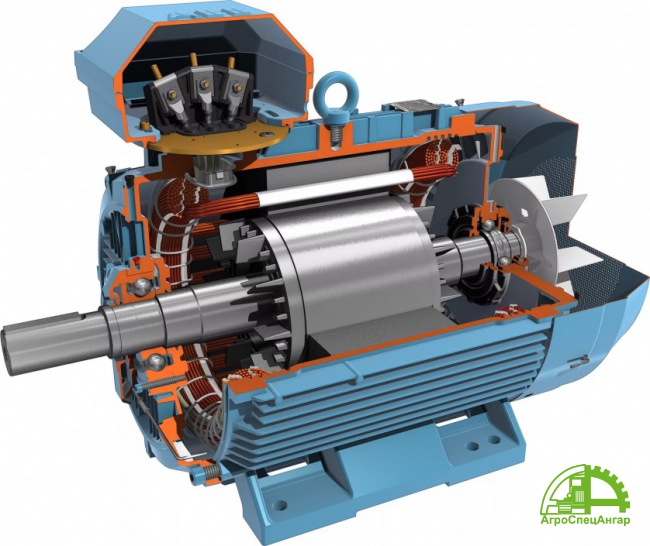
Двигатель переменного тока (AC) представляет собой тип электродвигателя, который преобразует переменный ток в механическую энергию посредством явления электромагнитной индукции. Он состоит из двух основных частей: внешнего статора, который генерирует магнитное поле с помощью переменного тока, и внутреннего ротора, который генерирует второе магнитное поле с помощью выходного вала.
Он состоит из двух основных частей: внешнего статора, который генерирует магнитное поле с помощью переменного тока, и внутреннего ротора, который генерирует второе магнитное поле с помощью выходного вала.
Постоянные магниты, реактивная энергия и электрические обмотки постоянного или переменного тока могут использоваться для создания магнитных полей ротора. В промышленности трехфазные двигатели переменного тока обычно используются для преобразования большой мощности из электрической энергии в механическую работу. Двигатель требует меньше энергии для запуска и является более прочным и долговечным.
Асинхронный двигатель
Для создания крутящего момента этому двигателю необходим электрический ток, который получается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора. В результате можно построить асинхронный двигатель без электрического соединения с ротором.
Асинхронные двигатели широко используются в промышленности, торговле и домашнем хозяйстве. Поскольку они работают на более низкой скорости, чем синхронные двигатели, эти двигатели иногда называют «асинхронными двигателями». Они имеют простую, прочную конструкцию, недорогую и не требуют особого ухода.
Поскольку они работают на более низкой скорости, чем синхронные двигатели, эти двигатели иногда называют «асинхронными двигателями». Они имеют простую, прочную конструкцию, недорогую и не требуют особого ухода.
Однофазный асинхронный двигатель
Однофазный источник питания используется для питания однофазного двигателя переменного тока, как следует из названия. На статоре используется однофазная обмотка, а на роторе — короткозамкнутая обмотка. Импульсное магнитное поле создается при подаче однофазного питания на обмотку статора. Из-за инерции в пульсирующем поле ротор не вращается.
Подробнее: Знакомство со стартером двигателя
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель преобразует трехфазную входную электрическую мощность в выходную механическую энергию с использованием электромеханической энергии. Эти двигатели используются в различных промышленных приложениях и предназначены для работы от трехфазных источников питания переменного тока. Дробилки, плунжерные насосы, краны, подъемники, компрессоры и конвейеры — вот лишь некоторые из областей применения.
Дробилки, плунжерные насосы, краны, подъемники, компрессоры и конвейеры — вот лишь некоторые из областей применения.
Серийный двигатель
Серийный двигатель представляет собой набор отдельных двигателей, в которых возбуждение соединено последовательно с обмоткой якоря, что позволяет протекать через нее большому току. Серийный двигатель выполняет ту же функцию, что и другие двигатели, в том смысле, что он преобразует электрическую энергию в механическую.
Присоединяйтесь к нашей рассылке новостей
Этот вид арматуры имеет клемму питания на одном конце и катушку возбуждения на другом. Когда внешнее магнитное поле почти сформировано, с ним взаимодействует проводник с током, и может производиться вращательное движение. Для электроприводов с постоянной и переменной скоростью они подходят как для приводов высокой, так и малой мощности.
Составной двигатель
Обмотка якоря составных электродвигателей соединена как с последовательными, так и с шунтирующими катушками возбуждения. Он несет достаточный магнитный поток в якоре, чтобы обеспечить достаточный крутящий момент, чтобы помочь вращаться с желаемой скоростью.
Он несет достаточный магнитный поток в якоре, чтобы обеспечить достаточный крутящий момент, чтобы помочь вращаться с желаемой скоростью.
Этот мотор был создан для улучшения качеств обоих моторов. Шунтовой двигатель имеет очень эффективное регулирование скорости, тогда как последовательный двигатель имеет очень высокий начальный крутящий момент. Однако пусковой момент ниже, чем у последовательного двигателя, а регулирование скорости менее эффективно, чем у параллельного двигателя.
Подробнее: Понимание диэлектрической проницаемости конденсатора
Двигатель PDMC
Полюса постоянного магнита используются в этих типах двигателей, как следует из названия. В этом двигателе магниты намагничены радиально и размещены на внутренних стенках цилиндрического стального статора. Поскольку в этом двигателе нет катушки возбуждения, крутящий момент создается взаимодействием потока якоря и постоянного потока.
Сердечник якоря, коммутатор и обмотка якоря составляют двигатель PDMC. Рабочее напряжение двигателя постоянного тока с постоянным током составляет 6 вольт, при этом 12 вольт доступны, если питание 24 вольта постоянного тока подается от источников напряжения, таких как батареи или выпрямители. Двигатели PMDC обычно используются в приложениях, требующих крошечных двигателей постоянного тока.
Рабочее напряжение двигателя постоянного тока с постоянным током составляет 6 вольт, при этом 12 вольт доступны, если питание 24 вольта постоянного тока подается от источников напряжения, таких как батареи или выпрямители. Двигатели PMDC обычно используются в приложениях, требующих крошечных двигателей постоянного тока.
Синхронный двигатель
Он определяется как двигатель переменного тока, в котором вращение ротора синхронизировано с частотой сети. В этом случае все обороты ротора равны целому числу, кратному частоте приложенного тока.
Для работы этого двигателя не требуется индукционный ток. В отличие от асинхронных двигателей, этот многофазный двигатель переменного тока оснащен электромагнитами на статоре, которые создают вращающееся магнитное поле. Эти двигатели часто используются в приложениях, требующих точного и постоянного действия.
Шаговый двигатель
Это тип электродвигателя, который разделяет полный оборот на множество равных шагов. До тех пор, пока двигатель соответствующим образом масштабируется для приложения с точки зрения крутящего момента и скорости, положением двигателя можно управлять, работая и удерживая любую из этих ступеней без какого-либо датчика положения для обратной связи.
До тех пор, пока двигатель соответствующим образом масштабируется для приложения с точки зрения крутящего момента и скорости, положением двигателя можно управлять, работая и удерживая любую из этих ступеней без какого-либо датчика положения для обратной связи.
Ротор и статор являются двумя наиболее важными компонентами. Ротор представляет собой вращающийся вал двигателя, а статор содержит неподвижные части двигателя, которые представляют собой электромагниты. Без необходимости активировать двигатель, эти двигатели могут обеспечить гибкость и постоянный удерживающий момент. Среди прочего, они используются в 3D-принтерах, текстильных машинах и печатных машинах.
Бесщеточный двигатель
Бесщеточный электродвигатель постоянного тока, работающий от источника постоянного тока. Двигатель оснащен электронным контроллером, который изменяет постоянные токи в обмотках двигателя, в результате чего магнитные поля вращаются в пространстве и следуют за ротором с постоянными магнитами.
Контроллер также управляет скоростью и крутящим моментом двигателя, регулируя фазу и амплитуду импульсов постоянного тока. Электродвигатели такого типа чрезвычайно эффективны, обеспечивая огромный крутящий момент в широком диапазоне скоростей. Бесщеточные двигатели используются в различных устройствах, включая жесткие диски, CD/DVD-плееры, насосы и т. д.
Подробнее: Обычные типы изоляторов, используемых в линиях электропередачи электромагнит в качестве статора. Переменная скорость, высокий крутящий момент трансмиссии и высокий начальный крутящий момент — все это атрибуты этого двигателя. Универсальные двигатели широко распространены в пылесосах, швейных машинах и других бытовых приборах.
Универсальный двигатель построен аналогично двигателю постоянного тока, но с некоторыми модификациями, позволяющими ему работать от сети переменного тока. Электродвигатели такого типа рассчитаны на вращение с высокой скоростью более 3500 об/мин. Поскольку катушка возбуждения и якорь будут иметь обратную полярность с источником тока, этот двигатель будет эффективно работать от источника переменного тока.
Гистерезисный двигатель
Это асинхронный двигатель с цилиндрическим ротором, который работает за счет индуцированных гистерезисных потерь в стальном роторе с высоким удерживанием. Он может работать в одной из трех фаз и бесшумен для окружающей среды, а также поддерживает постоянный темп.
Кроме того, эти типы электродвигателей долговечны и надежны в полевых условиях и могут работать на различных скоростях. Гистерезис и вихревые токи, которые индуцируются обмоткой статора, ответственны за крутящий момент, создаваемый в двигателе. В электрических часах, магнитофонах, проигрывателях и других устройствах звукозаписи и производства используются двигатели с гистерезисом.
Реактивный двигатель m
Реактивные двигатели с ферромагнитным ротором без обмоток имеют непостоянные магнитные полюса. Эти типы двигателей обеспечивают большую мощность по разумной цене, что делает их привлекательными для различных применений.
Когда магнитное вещество находится в магнитном поле, оно всегда движется вверх с малым сопротивлением в соответствии с принципом работы этого двигателя.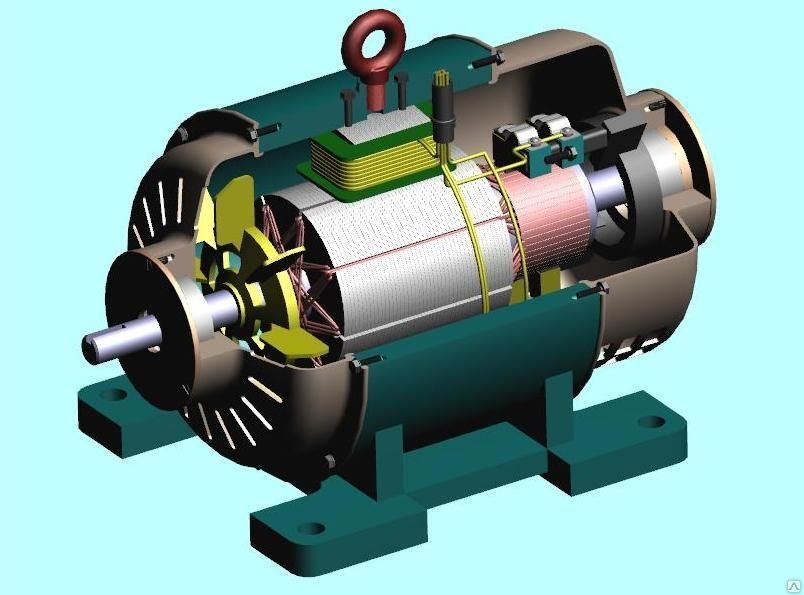 Основной недостаток заключается в том, что при работе на малых оборотах у него возникают значительные пульсации крутящего момента, что создает шум. Многие области применения включают таймеры, сигнальные устройства, записывающее оборудование и т. д.
Основной недостаток заключается в том, что при работе на малых оборотах у него возникают значительные пульсации крутящего момента, что создает шум. Многие области применения включают таймеры, сигнальные устройства, записывающее оборудование и т. д.
Линейный двигатель
Линейные двигатели имеют прямой ротор и статор, таким образом, вместо создания крутящего момента за счет вращения, он создает линейную силу по всей своей длине. С другой стороны, эти электродвигатели не всегда прямые.
Активный компонент линейного двигателя, например, подключен, тогда как более типичные двигатели имеют непрерывный контур. Существует два типа линейных двигателей: линейные двигатели с низким ускорением и линейные двигатели с высоким ускорением. Эти двигатели можно использовать для приведения в действие ленточных конвейеров, челноков текстильных ткацких станков и другого оборудования линейного перемещения.
Подробнее: Электрическая система автомобиля
Двигатель постоянного тока
Электродвигатели постоянного тока представляют собой электродвигатели вращательного типа, преобразующие электрическую энергию в механическую. Это указывает на то, что входная электрическая энергия представляет собой постоянный ток, который затем преобразуется в механическое вращение. Магнитное поле создает силы, которые используются в наиболее распространенных типах двигателей постоянного тока.
Это указывает на то, что входная электрическая энергия представляет собой постоянный ток, который затем преобразуется в механическое вращение. Магнитное поле создает силы, которые используются в наиболее распространенных типах двигателей постоянного тока.
Проводник с током получает крутящий момент и развивает направление движения при создании магнитного поля. Почти каждый двигатель постоянного тока имеет внутреннее устройство, электромеханическое или электронное, которое регулярно переключает направление тока в двигателе. В игрушках, электромобилях, кранах, подъемниках и сталепрокатных станах используются эти двигатели самых разных размеров.
Шунтовой двигатель
Это тип двигателя постоянного тока, в котором обмотка возбуждения и обмотка якоря соединены параллельно. В результате две обмотки двигателя подвергаются воздействию одного и того же источника напряжения, и он поддерживает индуктивную скорость при любой нагрузке.
При включении двигателя постоянного тока ток проходит как через статор, так и через ротор. Это приводит к созданию двух полей: полюса и арматуры. Шунтовые двигатели известны своим низким пусковым моментом и стабильной скоростью работы. Центробежные насосы, элеваторы, токарные станки, конвейеры и прядильные машины используют этот тип двигателя.
Это приводит к созданию двух полей: полюса и арматуры. Шунтовые двигатели известны своим низким пусковым моментом и стабильной скоростью работы. Центробежные насосы, элеваторы, токарные станки, конвейеры и прядильные машины используют этот тип двигателя.
Двигатель с независимым возбуждением
В этих типах электродвигателей основное питание подается независимо на якорь и обмотку возбуждения, как следует из названия. Поскольку обмотка возбуждения питается от отдельного источника постоянного тока, ток от якоря через нее не проходит.
Двигатели постоянного тока с независимым возбуждением идеально подходят для приложений, требующих широкого диапазона изменений скорости. Сталепрокатные заводы, бумагоделательные машины, судовые двигатели и другие устройства используют электродвигатели этого типа.
Подробнее: Понимание ядерной энергии
Заключение
Комбинируя магнетизм и электрический ток, электродвигатель генерирует механическую энергию, используя постоянный или переменный ток. Из-за условий эксплуатации и размера двигателя это чрезвычайно эффективные устройства. Источники постоянного тока, такие как батареи или выпрямители, и/или источники переменного тока, такие как электрические сети, инверторы или электрические генераторы, используются для питания электродвигателей. Тип источника питания, конструкция, применение и тип выходной скорости — все это факторы, которые можно использовать для классификации двигателей.
Из-за условий эксплуатации и размера двигателя это чрезвычайно эффективные устройства. Источники постоянного тока, такие как батареи или выпрямители, и/или источники переменного тока, такие как электрические сети, инверторы или электрические генераторы, используются для питания электродвигателей. Тип источника питания, конструкция, применение и тип выходной скорости — все это факторы, которые можно использовать для классификации двигателей.
Это все, что касается этой статьи, в которой обсуждаются различные типы электродвигателей. Надеюсь, вы многому научитесь из прочитанного, если да, поделитесь с другими учениками. Спасибо за чтение, увидимся!
Основы выбора двигателя: Типы двигателей переменного/постоянного тока
Какой тип электродвигателя выбрать для конвейера, стола XYZ или робота? Прежде чем выбрать один, вы должны понять характеристики каждого типа двигателя на рынке.
Типы электродвигателей
Существует два очевидных типа электродвигателей в зависимости от входного напряжения: переменного тока (переменного тока) или постоянного тока (постоянного тока).
В то время как двигатели переменного тока используют переменный ток для питания ряда намотанных катушек, двигатели постоянного тока используют постоянный ток для питания угольных щеток или электрической коммутации. Двигатели постоянного тока, как правило, более эффективны и компактны, чем двигатели переменного тока.
Важно понимать не только различия между характеристиками двигателей переменного и постоянного тока, но и конкретные типы внутри этих категорий.
Помните, что некоторые производители могут предлагать как двигатели, так и драйверы. Даже если двигатель постоянного тока, его драйвер может содержать внутренний источник питания, поэтому драйверы с входом переменного тока могут легко управлять двигателями постоянного тока с источником питания переменного тока.
Теперь давайте углубимся в двигатели переменного и постоянного тока.
| Двигатели переменного тока |
Двигатели переменного тока можно разделить на четыре основные категории: с расщепленными полюсами, с расщепленной фазой, с пусковым конденсатором, с пусковым конденсатором/рабочим конденсатором и с постоянным разделенным конденсатором.
Поскольку компания Oriental Motor производит только двигатели переменного тока с постоянными конденсаторами с разделенным конденсатором, мы рассмотрим только двигатели PSC.
Каждый тип двигателя PSC аналогичен по конструкции. В статоре имеются обмотки, а для вращения используется короткозамкнутый ротор. Конденсаторы необходимы для однофазных двигателей для создания многофазного источника питания. Эти двигатели очень просты в управлении и не требуют драйвера или контроллера для работы. Незначительные различия изменяют характеристики базового асинхронного двигателя переменного тока для удовлетворения различных потребностей в производительности, таких как различные типы тормозов.
Различные типы двигателей переменного тока «PSC»
|
Асинхронные двигатели / асинхронные двигатели
Асинхронные двигатели являются наиболее распространенными и рассчитаны на непрерывную работу. Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
На приведенном ниже рисунке показаны конструкция и конструкция асинхронного двигателя.
|
① Фланцевый кронштейн |
 Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке.
Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке. Как они работают
Когда двигатель включен, он создает вращающееся магнитное поле в статоре. На ротор индуцируется ток, и магнитное поле, создаваемое индуцированным током, взаимодействует с вращающимся магнитным полем, создавая вращение.
В этой записи блога можно найти дополнительную информацию об асинхронных двигателях переменного тока.
Асинхронные двигатели надежны и могут использоваться для различных приложений общего назначения, где необходима непрерывная работа, а точность остановки не имеет решающего значения. Однофазные двигатели предлагаются для требований с фиксированной скоростью . Требования к переменной скорости могут быть выполнены за счет комбинации трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
Однофазные двигатели предлагаются для требований с фиксированной скоростью . Требования к переменной скорости могут быть выполнены за счет комбинации трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
|
Кривая скорость-момент отображает ожидаемую мощность двигателя Производительность двигателя представлена на графике кривой скорости-крутящего момента. Асинхронный двигатель переменного тока запустится с нулевой скорости при крутящем моменте «Ts», затем постепенно увеличит свою скорость, преодолев нестабильную область, и установится на «P» в стабильной области, где нагрузка и крутящий момент сбалансированы. Любые изменения его нагрузки приведут к смещению положения «P» по кривой, и двигатель остановится, если он будет работать в нестабильной области. |
 Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Реверсивные двигатели
Реверсивные двигатели по определению могут работать в обратном направлении и идеально подходят для операций пуска/останова. Реверсивный двигатель похож на асинхронный двигатель, но с фрикционным тормозом и более сбалансированными обмотками. Благодаря фрикционному тормозному механизму его обгон уменьшается примерно до 6 оборотов после отключения питания (до включения передачи). Обмотка двигателя также более сбалансирована, чтобы увеличить пусковой момент для работы в режиме пуска/останова.
Из-за дополнительного тепла, выделяемого реверсивными двигателями, их рекомендуемый рабочий цикл составляет всего 30 минут или 50 %. Примером применения реверсивного двигателя является делительный конвейер, который не слишком требователен к пропускной способности или точности остановки.
|
В задней части реверсивного двигателя установлен фрикционный тормозной механизм. Спиральная пружина оказывает постоянное давление, чтобы позволить тормозной колодке скользить к тормозному диску. Тормозное усилие, создаваемое тормозным механизмом реверсивного двигателя Oriental Motor, составляет примерно 10% выходного крутящего момента двигателя. |
|
| На графике показана разница между кривыми скорость-момент асинхронного двигателя и реверсивного двигателя. |
Двигатели с электромагнитным тормозом
Двигатели с электромагнитным тормозом сочетают в себе трехфазный асинхронный двигатель или однофазный реверсивный двигатель со встроенным электромагнитным тормозом, активируемым при отключении питания. По сравнению с реверсивными двигателями, эти двигатели обеспечивают перебег всего 2-3 оборота (до передачи) и могут использоваться до 50 раз в минуту. Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Тормозной механизм внутри двигателя с электромагнитным тормозом более совершенен, чем реверсивный двигатель. Вместо тормозной колодки и винтовой пружины, которая постоянно оказывает давление, электромагнитный тормоз включается и выключается электромагнитным и пружинным механизмом.
Как они работают
Как показано на изображении выше, когда на катушку магнита подается напряжение, якорь притягивается к электромагниту против силы пружины, тем самым отпуская тормоз и позволяя валу двигателя свободно вращаться. Когда напряжение не подается, пружина прижимает якорь к тормозной ступице и удерживает вал двигателя на месте, тем самым приводя в действие тормоз.
Двигатели с электромагнитным тормозом используются в вертикальных приложениях, где необходимо удерживать груз, или в приложениях, где груз должен быть заблокирован в положении при отключении питания.
Моментные двигатели
Моментные двигатели предназначены для обеспечения высокого пускового крутящего момента и характеристик наклона (крутящий момент максимален при нулевой скорости и постоянно уменьшается с увеличением скорости), а также для работы в широком диапазоне скоростей. Благодаря своей способности изменять выходной крутящий момент в зависимости от входного напряжения, они обеспечивают стабильную работу при заблокированном роторе или в условиях остановки, например, при намотке/натяжении.
|
Простая регулировка крутящего момента для натяжения |
Синхронные двигатели
Синхронные двигатели называются «синхронными», поскольку они используют специальный ротор для синхронизации своей скорости с частотой входной мощности. Для 4-полюсного синхронного двигателя, работающего на частоте 60 Гц, он будет вращаться со скоростью 1800 об/мин («синхронная скорость»). Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Другой тип синхронного двигателя, называемый низкоскоростным синхронным двигателем, обеспечивает высокоточное регулирование скорости, низкоскоростное вращение и быстрое двунаправленное вращение. В этих двигателях в роторе используются постоянные магниты, поэтому они очень отзывчивы. Однако они увеличивают количество полюсов, поэтому синхронная скорость снижается до 72 об/мин при 60 Гц. Низкоскоростные синхронные двигатели могут останавливаться в течение 0,025 секунды при частоте 60 Гц, если они работают в пределах допустимой инерции нагрузки.
Базовая конструкция низкоскоростных синхронных двигателей такая же, как у шаговых двигателей. Поскольку они могут работать от источника переменного тока и обеспечивают превосходные характеристики пуска и остановки, их иногда называют «шаговыми двигателями переменного тока».
| Двигатели постоянного тока |
Двигатели постоянного тока используют постоянный ток для питания угольных щеток и коллектора или для электрической коммутации обмоток с драйвером. Двигатели постоянного тока примерно на 30% эффективнее двигателей переменного тока, поскольку им не нужно индуцировать ток для создания магнитных полей. Вместо этого в роторе используются постоянные магниты.
Электродвигатели постоянного тока бывают двух основных типов: щеточные и бесщеточные. В то время как щеточные двигатели предназначены для приложений общего назначения, бесщеточные двигатели предназначены для точных приложений.
Различные типы двигателей постоянного тока
|
Коллекторные двигатели
Источник: Linear Motion Tips/Design World
Щетки и коллектор внутри щеточного двигателя механически коммутируют обмотки двигателя, и он продолжает вращаться до тех пор, пока к нему подключен источник питания. Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели предлагаются нескольких типов: щеточные двигатели с постоянными магнитами, шунтирующие, последовательные и составные. Типичное применение щеточного двигателя включает радиоуправляемые автомобили и дворники.
Поскольку Oriental Motor не производит щеточные двигатели, мы предлагаем ограниченную информацию о щеточных двигателях.
Бесщеточные двигатели
Системы бесщеточных двигателей обеспечивают лучшую производительность, чем щеточные двигатели, благодаря электрической коммутации и замкнутой обратной связи, но требуют, чтобы драйверы электрически коммутировали обмотки двигателя. Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Как они работают
Бесщеточный двигатель имеет встроенный магнитный элемент или оптический энкодер для определения положения ротора. Датчики положения посылают сигналы в схему привода. В бесщеточном двигателе используются трехфазные обмотки
, соединенные по схеме «звезда». В роторе используется радиально-сегментированный постоянный магнит.
ИС на эффекте Холла используется для магнитного элемента датчика. Внутри статора размещены три микросхемы на эффекте Холла, которые посылают цифровые сигналы при вращении двигателя. Эти сигналы сообщают водителю, с какой скоростью работает двигатель и когда нужно подать питание на следующий набор обмоток точно в нужное время.
Узнайте больше о различиях между щеточными и бесщеточными двигателями
Бесщеточные двигатели и приводные системы часто сравнивают с двигателями переменного тока и системами с частотно-регулируемым приводом. Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Мы также показываем кривую скорости и крутящего момента системы бесщеточного двигателя по сравнению с двигателем переменного тока и системой ЧРП с эквивалентным типоразмером.
| Бесколлекторный двигатель + драйвер | Двигатель переменного тока + ЧРП |
По сравнению с щеточными двигателями и двигателями переменного тока бесщеточные двигатели имеют ряд преимуществ, которые могут улучшить работу или уменьшить размеры для таких приложений, как конвейеры и мобильные роботы.
Бесколлекторные двигатели Oriental Motor комплектуются собственными драйверами для обеспечения гарантированных технических характеристик и быстрой настройки. Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Преимущество бесщеточного двигателя (по сравнению с двигателями переменного тока)
| Преимущества по сравнению с щеточными двигателями | по сравнению с двигателями переменного тока |
|
|
Шаговые двигатели
С технической точки зрения бесщеточные двигатели также включают шаговые двигатели и серводвигатели, которые предназначены для приложений позиционирования благодаря их превосходной способности останавливаться в точных местах. Одной вещью, которая отличает шаговые двигатели от бесщеточных двигателей или серводвигателей, является их способность работать без обратной связи.
Одной вещью, которая отличает шаговые двигатели от бесщеточных двигателей или серводвигателей, является их способность работать без обратной связи.
| Зубчатый ротор и статор с постоянным магнитом | Двухфазный метод возбуждения (упрощенная схема) |
Точность остановки шагового двигателя обеспечивается зубчатым намагниченным ротором и зубчатым электромагнитным статором. Другими словами, вместо 4 полюсов в приведенном выше примере бесщеточного двигателя стандартный шаговый двигатель 1,8° имеет 50 полюсов с 50 зубьями.
Благодаря конструкции ротора и статора шаговый двигатель перемещается на четверть шага зуба за каждый прямоугольный импульс, получаемый его драйвером, а скорость регулируется входной частотой импульсов, поэтому очень легко контролировать пройденное расстояние и скорость. с помощью шагового двигателя. Шаговый двигатель также создает удерживающий момент в состоянии покоя, что важно для поддержания точности позиционирования.
Шаговых двигателей с разомкнутым контуром может быть достаточно для обычных приложений с повторяющимся позиционированием. Тем не менее, шаговые двигатели с обратной связью доступны для расширенных приложений позиционирования, требующих как точности, так и проверки положения.
|
Характеристики скорости и крутящего момента шагового двигателя |
Кривая крутящего момента шагового двигателя обычно имеет нисходящий наклон; с самым высоким крутящим моментом, возникающим на низкой скорости, что означает, что его можно использовать для ускорения и замедления. В отличие от системы бесщеточного двигателя, шаговый двигатель не имеет области с ограниченным режимом работы. |
Если вы хотите узнать больше, я написал отдельные заметки о шаговых двигателях.
Узнайте о различиях между гибридными шаговыми двигателями, двигателями с постоянными магнитами и шаговыми двигателями с регулируемой скоростью
Узнайте больше о различиях между серводвигателями и шаговыми двигателями
| Совет по выбору двигателя: практическое правило (все двигатели)
5 |
|

Этот пост в блоге дает общее представление о многих типах двигателей переменного/постоянного тока, представленных на рынке. В дополнение к различиям в производительности решающими факторами также могут быть качество, стоимость, ассортимент продукции, время выполнения заказа и поддержка. Очень важно найти поставщика двигателей, который может гарантировать качество работы, предоставлять экспертную поддержку для широкого спектра продуктов и поставлять его в разумно короткие сроки.